Rockfall detection from terrestrial LiDAR point clouds: A clustering approach using R
Keywords:
rockfalls, LiDAR point cloud, terrestrial laser scanning (TLS), cluster analyses, feature extraction, R free softwareAbstract
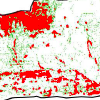
In this study we analyzed a series of terrestrial LiDAR point clouds acquired over a cliff in Puigcercos (Catalonia, Spain). The objective was to detect and extract individual rockfall events that occurred during a time span of six months and to investigate their spatial distribution. To this end local and global cluster algorithms were applied. First we used the nearest neighbor clutter removal (NNCR) method in combination with the expectation-maximization (EM) algorithm to separate feature points from clutter; then a density based algorithm (DBSCAN) allowed us to isolate the single cluster features which represented the rockfall events. Finally we estimated the Ripley's K-function to analyze the global spatial pattern of the identified rockfalls. The computations for the cluster analyses were carried out using R free software for statistical computing and graphics. The local cluster analysis allowed a proper identification and characterization of more than 600 rockfalls. The global spatial pattern analysis showed that these rockfalls were clustered and provided the range of distances at which these events tend to be aggregated.
Downloads
Published
Issue
Section
License
Copyright (c) 2014 Marj Tonini, Antonio Abellan

This work is licensed under a Creative Commons Attribution 4.0 International License.
Articles in JOSIS are licensed under a Creative Commons Attribution 3.0 License.